 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
NIRS device OpenIGTLink interface
Key Investigators
- Francisco Marcano Serrano (ULL - MACbioIDi)
- David Díaz Martín (ULL - MACbioIDi)
- José Luis González Mora (ULL - MACbioIDi)
- Juan Ruiz-Alzola (ULPGC - GTMA - MACbioIDi)
Project Description
In this project, we will explore the possibility of communicating a proprietary NIRS equipment under development with 3D Slicer through OpenIGTLink protocol. Our team is currently developing a NIRS device that can be currently controlled and interrogated from 3DSlicer through commands implemented over TCP/IP protocol. We aim to include the ability in the NIRS device to interact with 3DSlicer through the standard OpenIGTLink protocol. To achieve this goal in this week, we propose to study what modifications of the device software are necessary to implement a minimum of interoperability between 3DSlicer and the NIRS device through OpenIGTLink.
Objective
- Implementing minimum set of commands to control and retrieve information from NIR device through OpenIGTLink protocol / 3DSlicer.
Approach and Plan
- Discuss the convenience of making our NIRS device OpenIGTLink-compliant.
- Select minimum set of queries/messages to implement.
- Implement a simple 3DSlicer module showing control/interaction with NIRS device.
Progress and Next Steps
- OpenIGTLink library was installed in NIRS device uProcessor (Raspberry Pi Zero)
- TrackerServer example code was changed (myTrackerServer) to receive simulated position parameters from uController.
- myTrackerServer and ImageServer example code were implemented as services in the Raspberry Pi Zero to have a simple tracking and image servers .
- SlicerOpenIGTLink module was installed in 3DSlicer to define connectors and visualize tracking and image data.
- A minimum mechanism was successfully implemented in the NIRS device to communicate with 3D Slicer through OpenIGTLink protocol.
- Raspberry pi Zero W + microcontroller combined system is an powerful and cheap option for making OpenIGTLink-compatible hardware and interacting with Slicer.
Illustrations
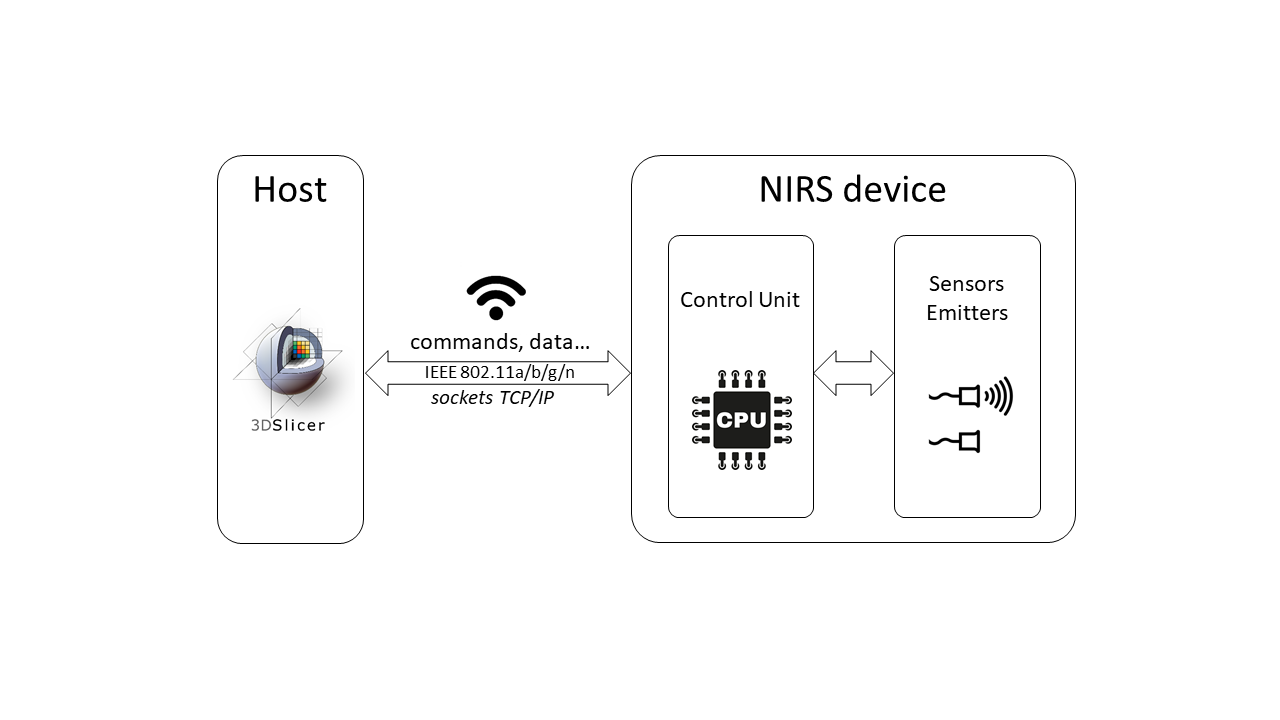 Fig. 1: Architecture (original figure at the beginning of workshop) .
</p>
Fig. 1: Architecture (original figure at the beginning of workshop) .
</p>
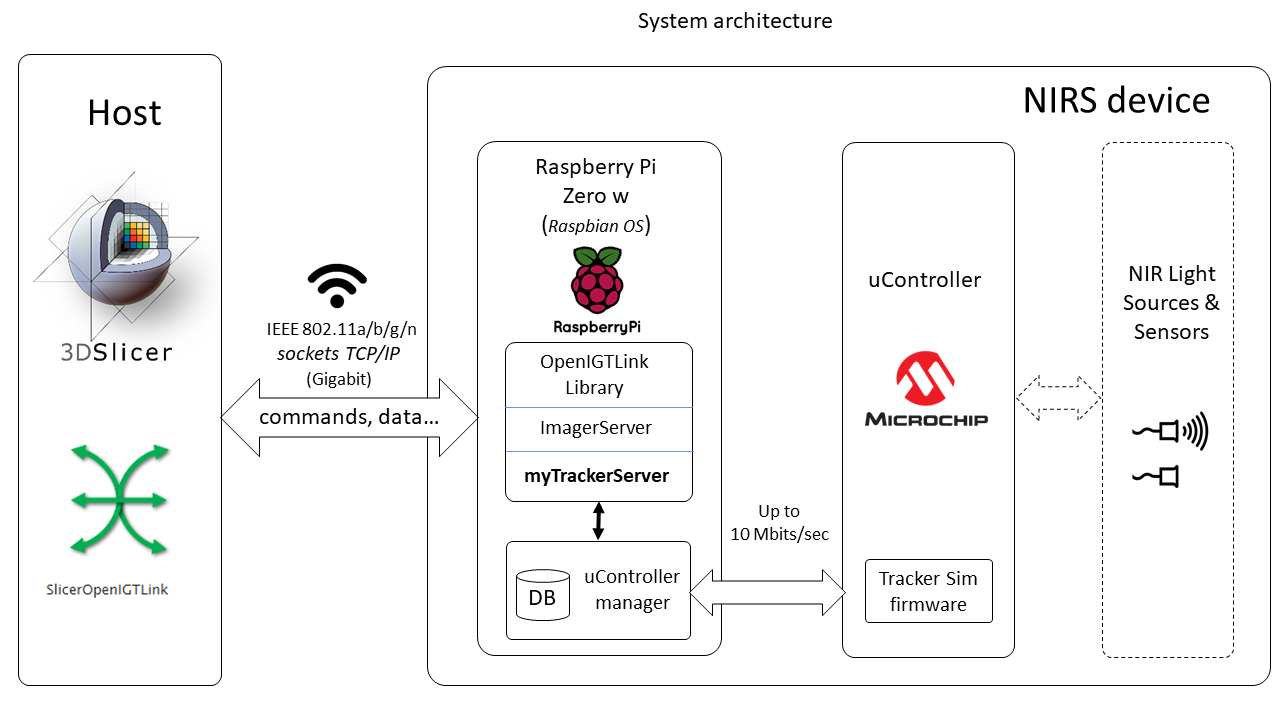 Fig. 2: System architecture (detail). NIR light sensors/sources modules were not installed in the hardware setup used in this workshop.
</p>
Fig. 2: System architecture (detail). NIR light sensors/sources modules were not installed in the hardware setup used in this workshop.
</p>
 Fig. 3: Operation example. ImagerClient is running in the red window. TrackerClient is running in 3D window. Microcontroller is turned on (“operationmode” command) and off (“commandmode”) by sending TCP/IP commands. TrackerClient receive position data when microcontroller is on.
</p>
Fig. 3: Operation example. ImagerClient is running in the red window. TrackerClient is running in 3D window. Microcontroller is turned on (“operationmode” command) and off (“commandmode”) by sending TCP/IP commands. TrackerClient receive position data when microcontroller is on.
</p>
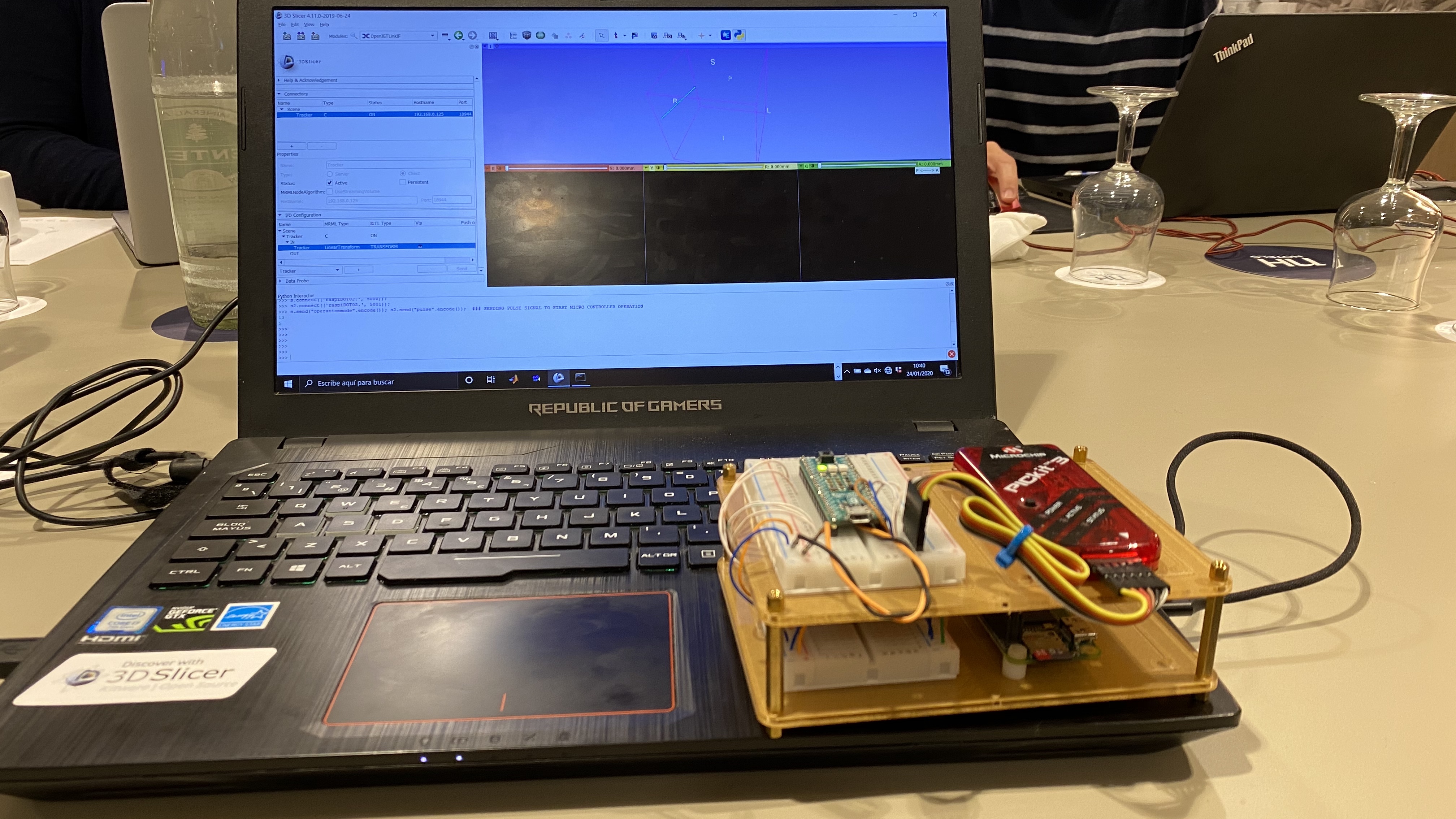 Fig. 4: Hardware Setup used during the workshop.
</p>
Fig. 4: Hardware Setup used during the workshop.
</p>