 NA-MIC Project Weeks
NA-MIC Project Weeks
Slicer module for 3D stereophotogrammetry
Key Investigators
- Chi Zhang (Seattle Children’s Research Institute)
- A. Murat Maga (University of Washington and Seattle Children’s Research Institute)
- Steve Pieper (Isomics, Inc)
Project Description
3D stereophotogrammetry has becoming increasingly common in biomedical and clinical fields as an economic, fast, flexible and safe (non-invasive, no radiation) way to achieve accurate 3D surface models. In particular, photogrammetry can acquire realistic surface texture that allows researchers and clinicians to accurately assess traits and placing landmarks.
To further reduce the cost and faciliate the use of photogrammetry, we want to build an open-source pipeline for photogrammetry in 3D Slicer for from digital image post-processing to photogrammetric 3d mesh reconstruction and texturing that incorporate open-source software and packages. Eventually, we will also create guidelines for clinicians and researchers, espically using mobile devices (e.g., smart phone), for Slicer-based photogrammetry.
Objective
- Build open-source software and packages asscoiated with photogrammetry (e.g., WebODM, ExifTool, OpenCV, OpenSFM) into Slicer. Create GUI for adjusting parameters.
- Loading multi-png textured model into Slicer
- 3D model and texture building from point clouds created from photogrammetry software.
- Import partial textured models into Slicer, clean them up, align and fuse.
Approach and Plan
- Figure out what our issues and priorities are:
- how imporant is visual fidelity vs convenience (point clouds are more conveneient but lower image quality compared to textured models)
- how much do we imaging users interactively fixing geometry at various levels of detail
- how much do we need to rely on third party code and what maintenance or licencing considerations come with it
- Determine what parts of the process Slicer can be particularly useful for (i.e. should we bring in the raw images and estimate the camera parameters or assume that other software has already done that).
- Work to define and describe the ideal interactive workflow leveraging existing Slicer functionality like markups and segmentations.
Progress and Next Steps
- Adapt an online example to render an obj file with multiple resources through
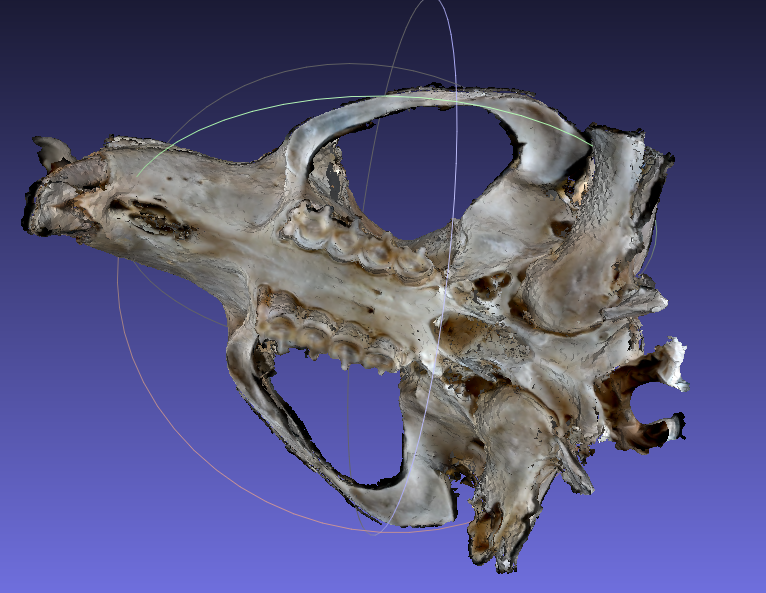
vtkRenderer. First build avtkOpenGLPolyDataMapperto link to the mesh and store each texture image according to material names, and then add avtkOpenGLActorto refer to the content of the mapper. Finally, passing the actor to the rendere. However, for our dataset,vtkRenderercrashed whenever I rendered the model with more than 14 texture images (on Windows), while w111 accompanied texture images. Steve confirmed the same issue on Mac. Below an example of rendering with 10 texture images.






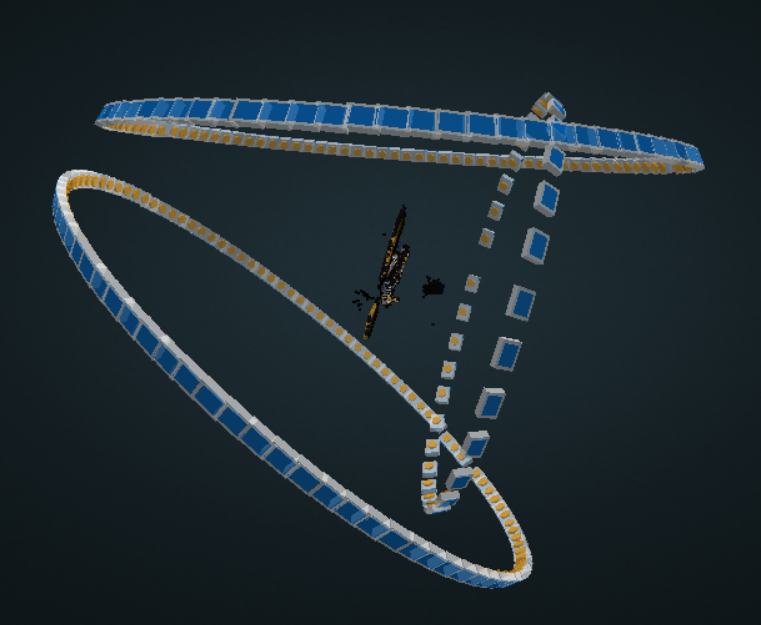
 Example camera positions reconstructed by WebODM, viewed in WebODM
Example camera positions reconstructed by WebODM, viewed in WebODM
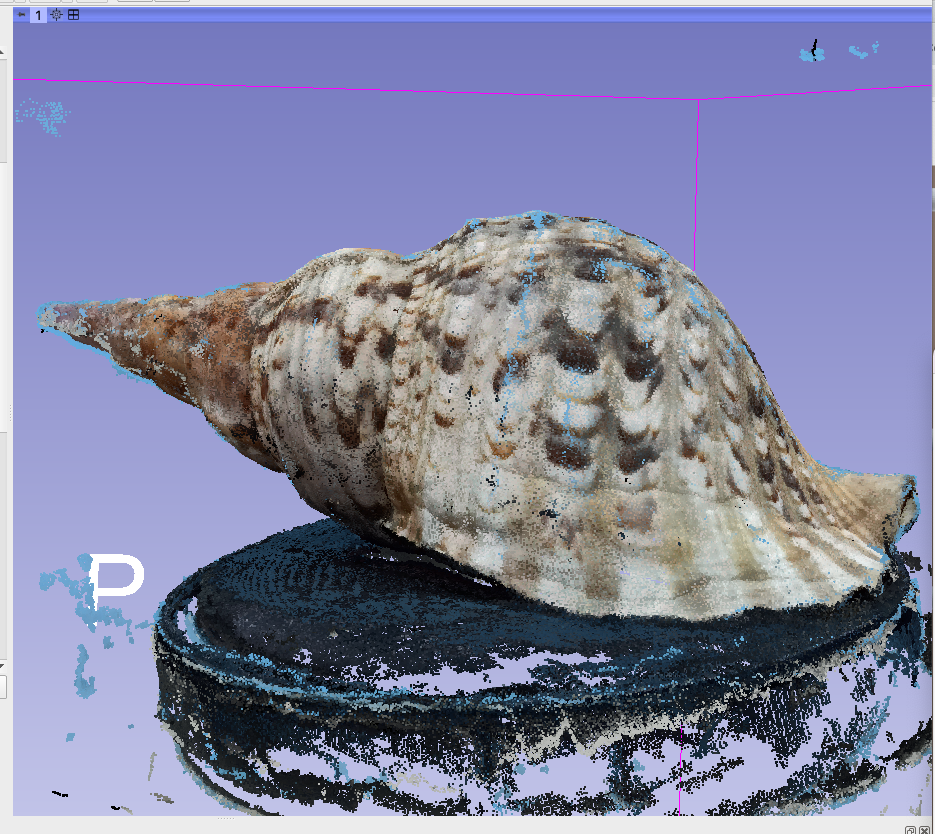
 Example point cloud exported from webODM and loaded in Slicer using [this code](https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c).
Example point cloud exported from webODM and loaded in Slicer using [this code](https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c).

 # Background and References
1. The repository for SlicerPhotoGram: [https://github.com/SlicerMorph/PhotoGram](https://github.com/SlicerMorph/PhotoGram).
2. Currently, we have created a script [output_cropped_image.py](https://github.com/SlicerMorph/PhotoGram/blob/main/output_cropped_images.py) for loading digital image sequnece as a volume, crop each image using ROI tool for reducing background noise, and export each cropped slice as a tiff image.
3. WebODM for photogrammetry that rely on OpenCV and OpenSFM: [https://www.opendronemap.org/docs/](https://www.opendronemap.org/docs/) and [https://github.com/OpenDroneMap/WebODM](https://github.com/OpenDroneMap/WebODM).
4. We have a script for loading WebODM point clouds in Slicer: [https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c](https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c)
# Background and References
1. The repository for SlicerPhotoGram: [https://github.com/SlicerMorph/PhotoGram](https://github.com/SlicerMorph/PhotoGram).
2. Currently, we have created a script [output_cropped_image.py](https://github.com/SlicerMorph/PhotoGram/blob/main/output_cropped_images.py) for loading digital image sequnece as a volume, crop each image using ROI tool for reducing background noise, and export each cropped slice as a tiff image.
3. WebODM for photogrammetry that rely on OpenCV and OpenSFM: [https://www.opendronemap.org/docs/](https://www.opendronemap.org/docs/) and [https://github.com/OpenDroneMap/WebODM](https://github.com/OpenDroneMap/WebODM).
4. We have a script for loading WebODM point clouds in Slicer: [https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c](https://gist.github.com/pieper/e4ca5e4c753c5ed6c61656d25b93402c)