 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
ROS-MED: Integration of 3D Slicer and ROS2 for Image-Guided Robot-Assisted Interventions
Key Investigators
- Junichi Tokuda (Brigham and Women’s Hospital)
- Tamas Ungi (Queen’s University)
- Axel Krieger (Johns Hopkins University)
- Simon Leonard (Johns Hopkins University)
- Mark Fuge (University of Maryland)
- Lydia Al-Zogbi (Johns Hopkins University)
- Milad Habibi (University of Maryland)
- Pedro Moreira (Brigham and Women’s Hospital)
Project Description
The ultimate goal of this project is to provide a software platform to integrate medical image computing software (3D Slicer) into a system for image-guided robot-assisted interventions, in which 2D/3D medical images are used for planning, navigation, monitoring, and validation. Examples of such robot-assisted systems include image-guided robotic needle-guide systems and surgical CAD/CAM systems. Those systems often require a wide range of image computing capabilities such as segmentation of anatomical structures, registration of multiple images, 2D/3D image visualization, image-based planning, and data sharing with the robot controller and the hospital’s picture archiving and communication systems (PACS). Integration of a solid medical image computing platform into a robotic system is becoming more important than ever with the growing interest in AI-based treatment planning and guidance.
However, the engineering effort to implement those features is often underestimated in academic research due to limited engineering resources or the scope of the project. Fortunately, many of those features have already been implemented and validated in the research community and often distributed as open-source software. Therefore it has become essential for academic researchers to take advantage of those existing tools and incorporate them into their own research instead of reinventing the wheel.
Our team has been integrating 3D Slicer and Robot Operating System using OpenIGTLink to achieve the above goal following our first project, and recently received a grant from National Institutes of Health (2R01EB020667). In this year, we will focus on transition to the new ROS platform (ROS2).
Objective
- Objective A. Explore ROS2 as a potential platform for our study on image-guided model-driven needle placement robot.
Approach and Plan
- Run ROS2 on a universal robot arm (UR-10) at JHU.
- Prototype a new version of ROS-IGTL-Bridge
- Display a 3D model of the UR-10 on 3D Slicer, and synchronize its posture with the robot by sending the transform of each link.
Progress and Next Steps
First meeting (1:00pm on Discord)
- Participants: Tamas, Junichi Pedro
Kick-off meeting (2:30pm on Discord)
- Participants: Tamas, Lydia, Junichi, Simon
- Confirm the goal of the project
- Breakdown the tasks
- Prototype ROS-IGTL-Bridge (Junichi)
- Setup a remote environment for the the UR-10 computer at Dr. Krieger’s lab at JHU (Lydia)
- Install ROS2 on the UR-10 computer remotely (Simon)
- Test UR-10 + ROS2 + 3D Slicer (Simon)
- Test ROS2 on non-Linux environment (Tamas)
- New workshop tutorial
- Add AI-based segmentation?
- Recycle a surgical plan generated in Tamas’ AI segmentation tutorial
- The new workshop tutorial will focus on ROS, but could direct audience to Tamas’ AI segmentation tutorial, if they are interested.
ROS 2 testing on other environment
Tamas tried installing ROS2 on windows, but was not straightfoward. It might not be a viable solution for the workshop tutorial.
First implementation of ROS2-OpenIGTLink bridge
The original interface for ROS1 (ROS_IGTL_Bridge) has been modified for ROS2. The modified interface is now working with ROS 2 with limited capability (only supports text, transform, and point)
Setup ROS 2 and 3D Slicer on universal robot (UR-10e)
Approach:
- Preload visual models of the links of the universal robot.
- Define a linear transform for each link of the universal robot in the Slicer scene.
- Place each link under the corresponcing transform.
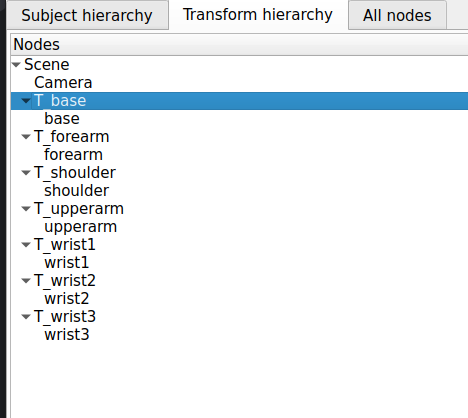
- The contorller on ROS 2 exports the transform of each link to OpenIGTLink
Results:
- ROS2 was installed successfully on the computer connected to UR10e
- Visual models of UR-10e was successfully imported to 3D Slicer. However, there seemed to be an issue with the coordinate frame. (Later, Andras pointed out it was related to RAS/LPS issue with the STL files.
- Robot was successfuly controlled from ROS, and 3D Slicer could visualize the posture of the robot in real-time.
- Video
Background and References
- Frank T, Krieger A, Leonard S, Patel NA, Tokuda J. ROS-IGTL-Bridge: an open network interface for image-guided therapy using the ROS environment. Int J Comput Assist Radiol Surg. 2017 Aug;12(8):1451-1460. doi: 10.1007/s11548-017-1618-1. Epub 2017 May 31. PMID: 28567563; PMCID: PMC5543207.
- ROS-IGTL-Bridge (for ROS 1)
- ros2_igtl_bridge (for ROS 2)
Acknowledgement
This work is supported by NIH R01EB020667 (MPI: Tokuda, Krieger, Fuge, Leonard).