 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
MRI Needle Placement Procedure
Key Investigators
- Kevin Cleary (SZI - Children’s National)
- Eleni Siampli (SZI - Children’s National)
- Steve Pieper (Isomics)
- Andras Lasso (Queen’s University, Canada)
- Andrey Fedorov (BWH)
Project Description
MRI guided devices have been designed for biopsies or other interventions. The aim is to adapt Slicer for MR-guided needle placement procedures using MRI compatible robots.
Objective
We are planning to collect information about best practices to use different toolboxes or modules at Slicer.
- Understand how SliceTracker, SlicerIGT, OpenIGTLink, SlicerDevelopementToolbox works
- Make Implementation decisions based on these
Approach and Plan
- Meet with developers with relevant experience
- Collect list of potential issues and solutions, best practices, and pointers to reusable code.
Progress and Next Steps
Illustrations
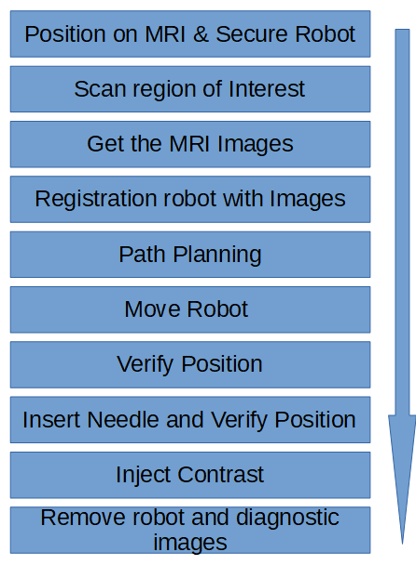
Workflow
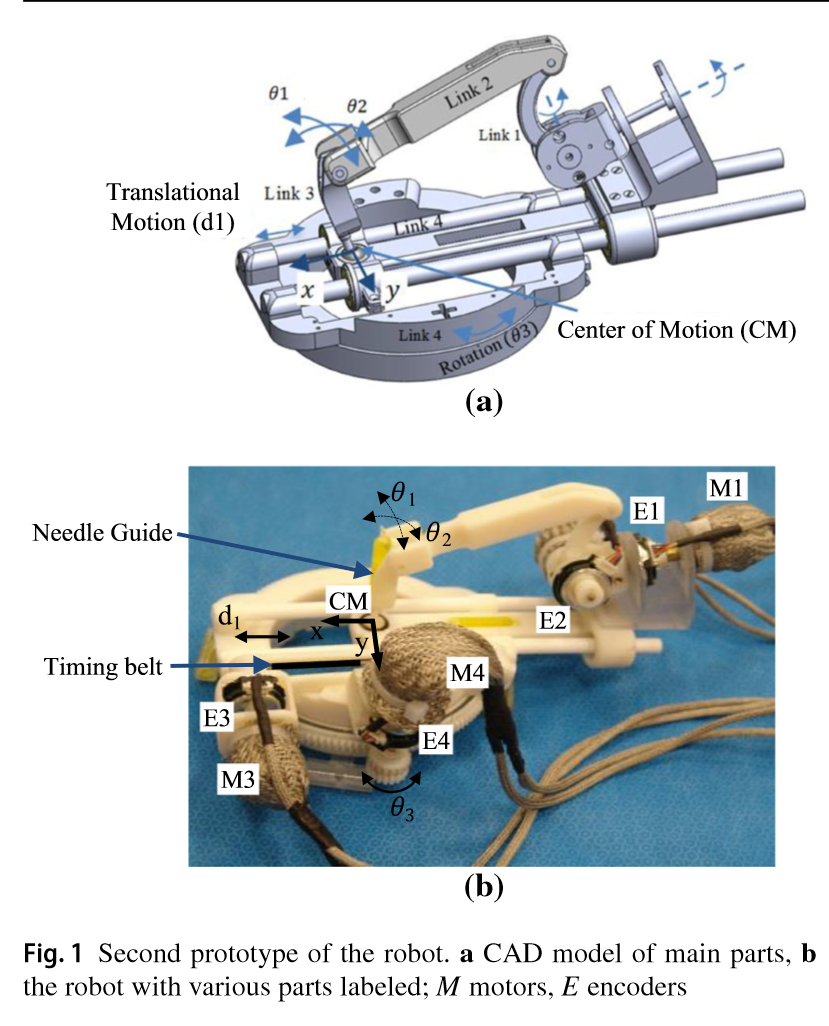
Prototype of the robot
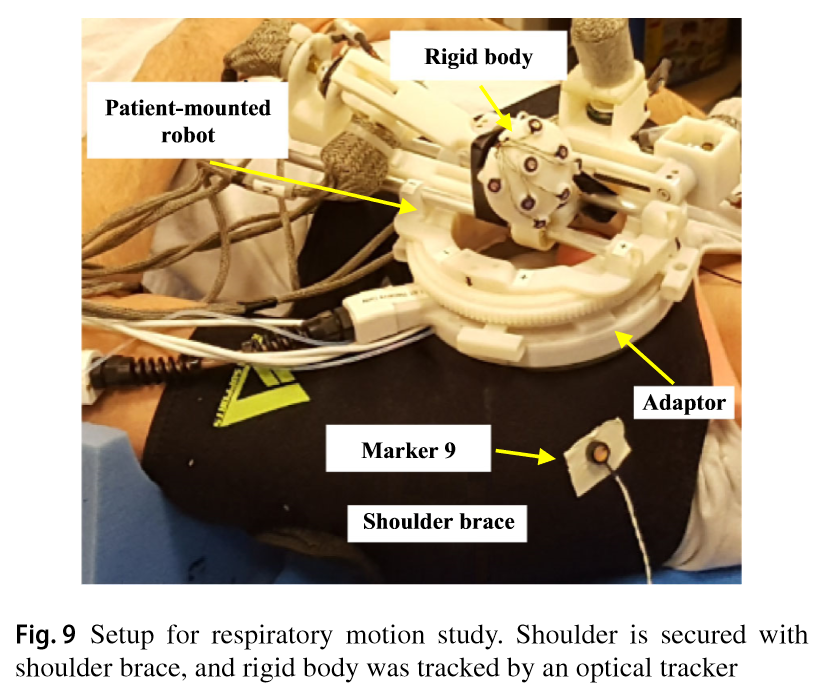
Body mounted robot - stydy for respiratory motion study
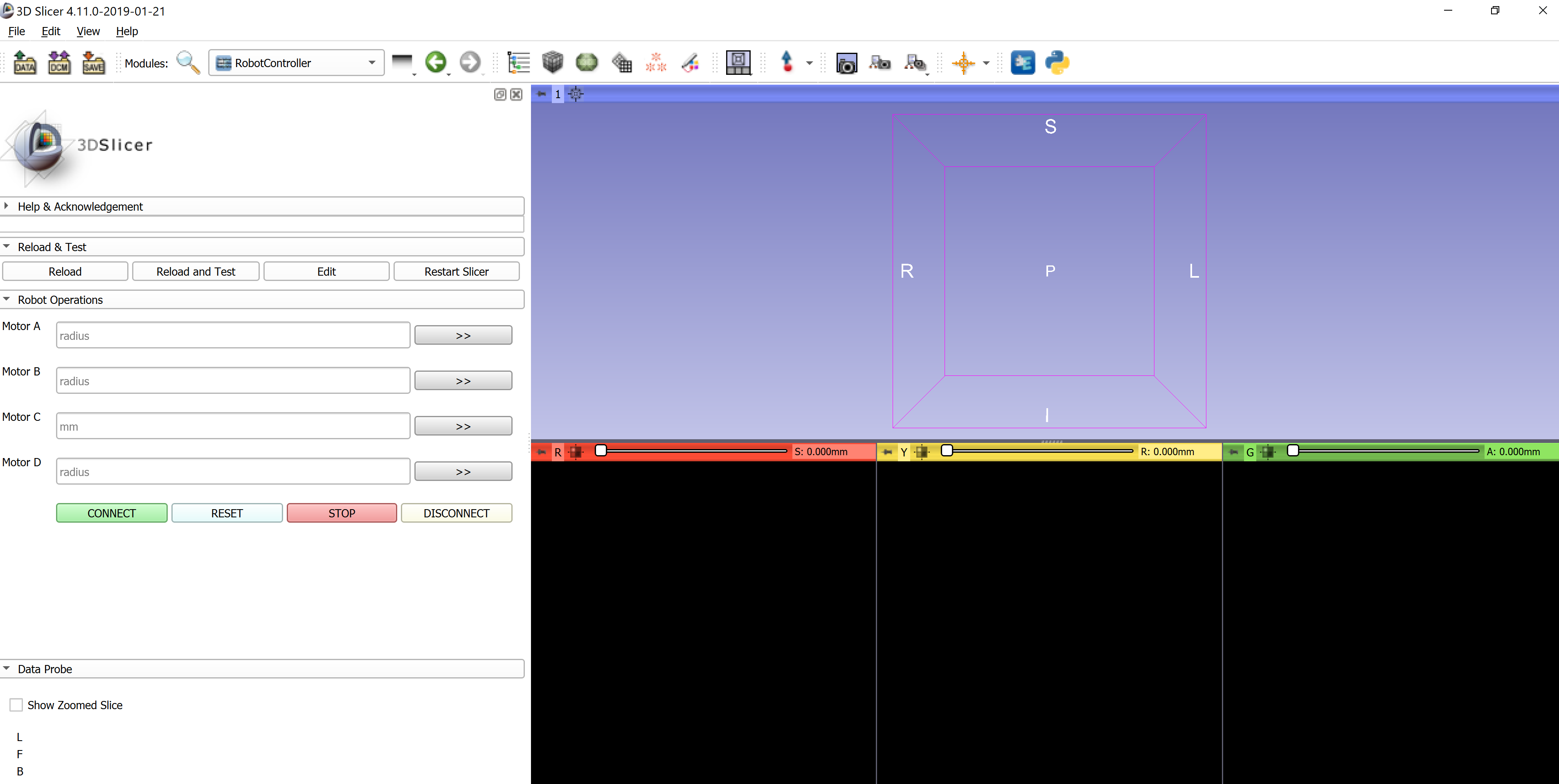
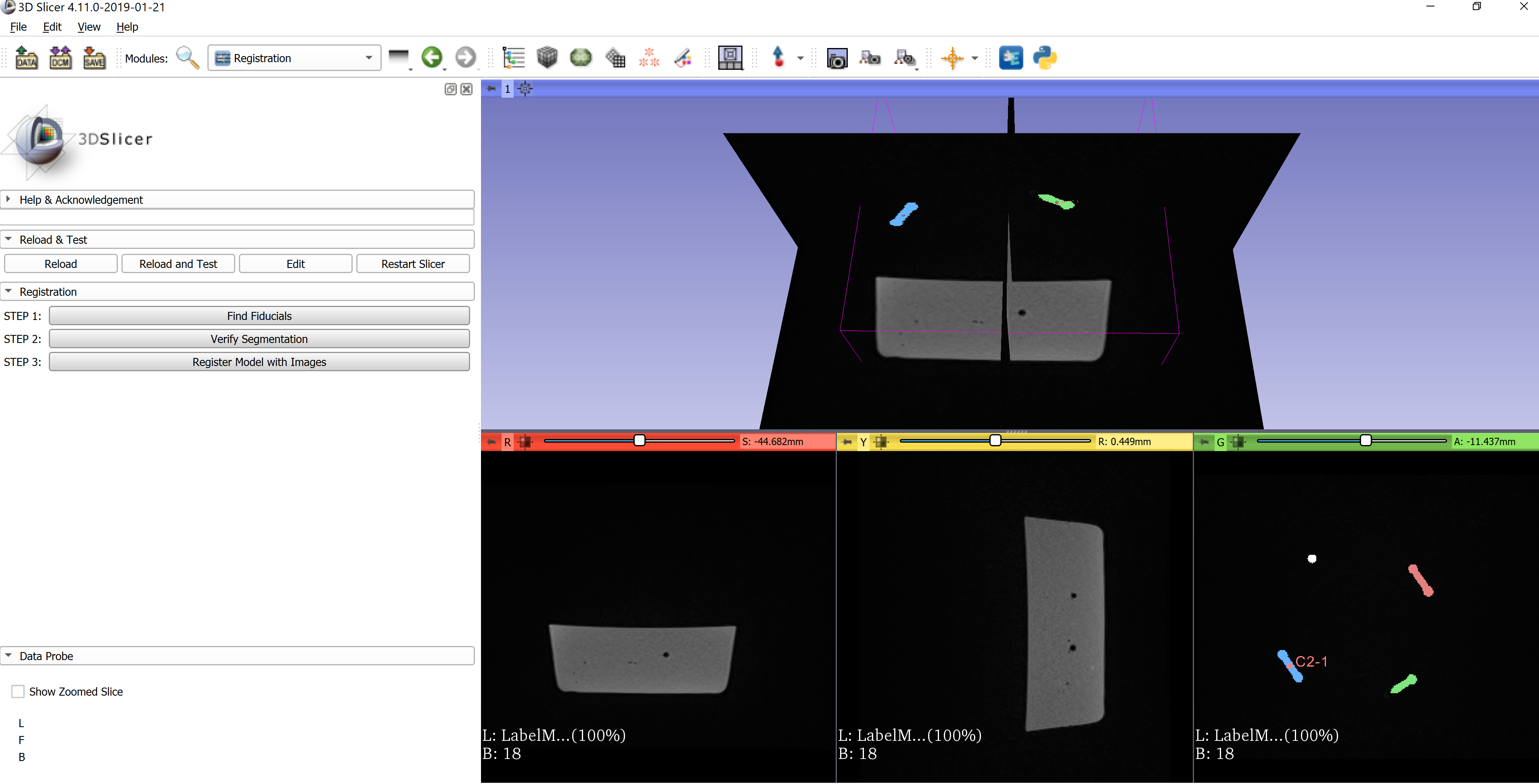
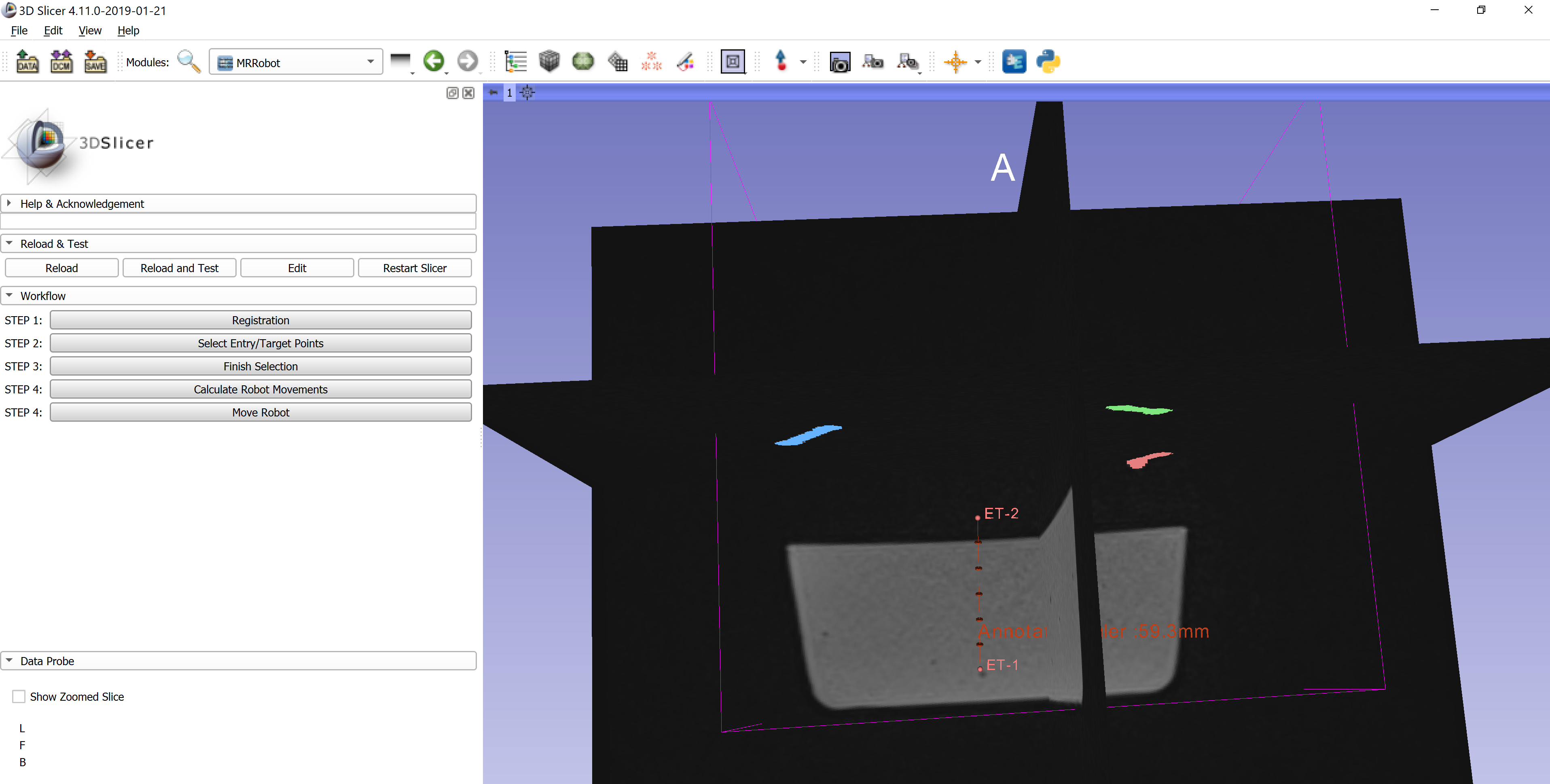
GUI for MR-needle guidance
Create MRI Robots extension
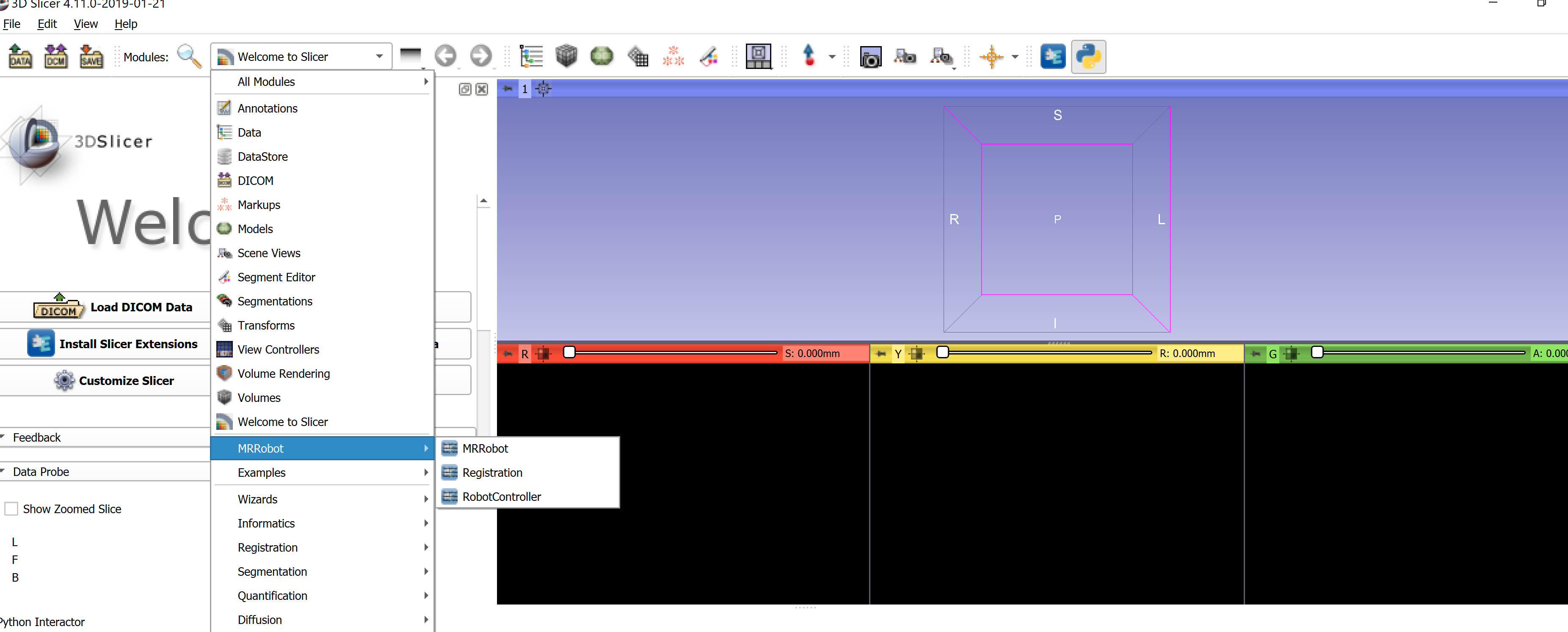
Robot Controller Modules
Registration module
MR Robot Module
Publications
Development of a shoulder-mounted robot for MRI-guided needle placement
(https://github.com/NA-MIC/ProjectWeek/blob/master/PW30_2019_GranCanaria/Projects/MRINeedleGuidance/Monfaredi2018_Article_DevelopmentOfAShoulder-mounted.pdf)