NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
Affordable IGT Simulators with Slicer IGT + PLUS
3D Slicer affordable (low cost) navigated ultrasound system for training purpose description for the 27th NA-MIC Project Week at Boston.
Key Investigators
- Guillermo Valentín Socorro-Marrero (ULPGC - GTMA - MACbioIDi)
- Jose Carlos Ruiz-Luque (ULPGC - GTMA - MACbioIDi)
- Abián Hernández-Guedes (ULPGC - GTMA - MACbioIDi)
- Juan Ruiz-Alzola (ULPGC - GTMA - MACbioIDi)
- Andras Lasso (PerkLab, Queen’s University)
- Tamas Ungi (PerkLab, Queen’s University)
- Mark Asselin (PerkLab, Queen’s University)
Project Description
In this project we aim at creating and integrating an Image Guided Therapy (IGT) ultrasound training system in 3D Slicer. Specifically, the main objective is the implementation of an affordable navigated ultrasound simulator based on ArUco low cost optical trackers. The ultrasound simulator already implemented in the PLUS Toolkit is used as reference and new geometrical models will be included.
Objective
- Track ultrasound probe with low cost optical trackers.
- Integrate the tracked probe in an ultrasound simulator already implemented in PLUS Toolkit.
- Improve the pose accuracy to make it suitable for training purpose.
- Allow customization of the simulated geometrical models to a prescribed training lecture.
Approach and Plan
- Define a proper ArUco optical tracker system (web camera and markers selection and distribution).
- Program the integration of the tracked probe in the ultrasound simulator device included in PLUS Toolkit.
- Implement strategies for track accuracy improvement.
- Replace the default model simulated in the PLUS device with a custom arm model.
- Test and verify the overall system.
Progress and Next Steps
- The system setup (camera and trackers, probe, needle, phantom block, etc.) was tested and successfully completed.
- We confirm that the camera auto-focus is not suitable for tracking. Webcam models without this facility should be considered in the future.
- The pivot and spin calibrations for needle-like tools and the fiducial calibration of bodies yield an accuracy good enough for training applications and no strategies for track accuracy improvement was needed. Without actual ultrasound images, manual calibration of probe was required.
- Instead of the arm model, we create a very simple one based on basic geometrical shapes. However, the proof of concept for customizing any particular case is done.
- Unfortunately, the calibration of the US simulator failed. The prescribed spatial model seems to mismatch with the actual and virtual scenarios. Therefore the US image does not correspond to the expected one. This should be checked and fixed in the next few days.
Illustrations
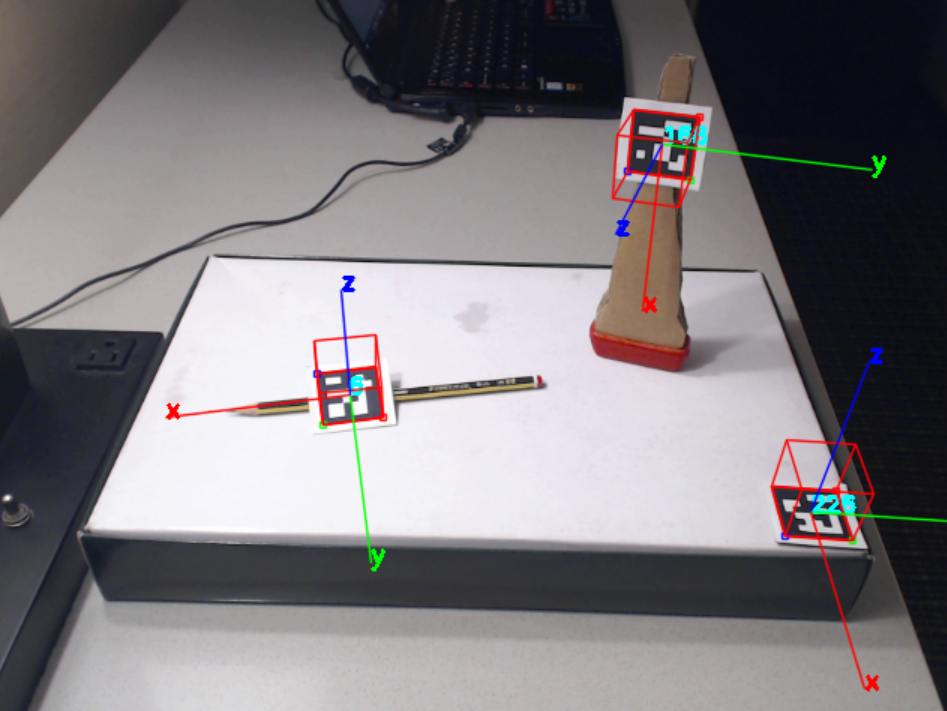
Tracking system setup
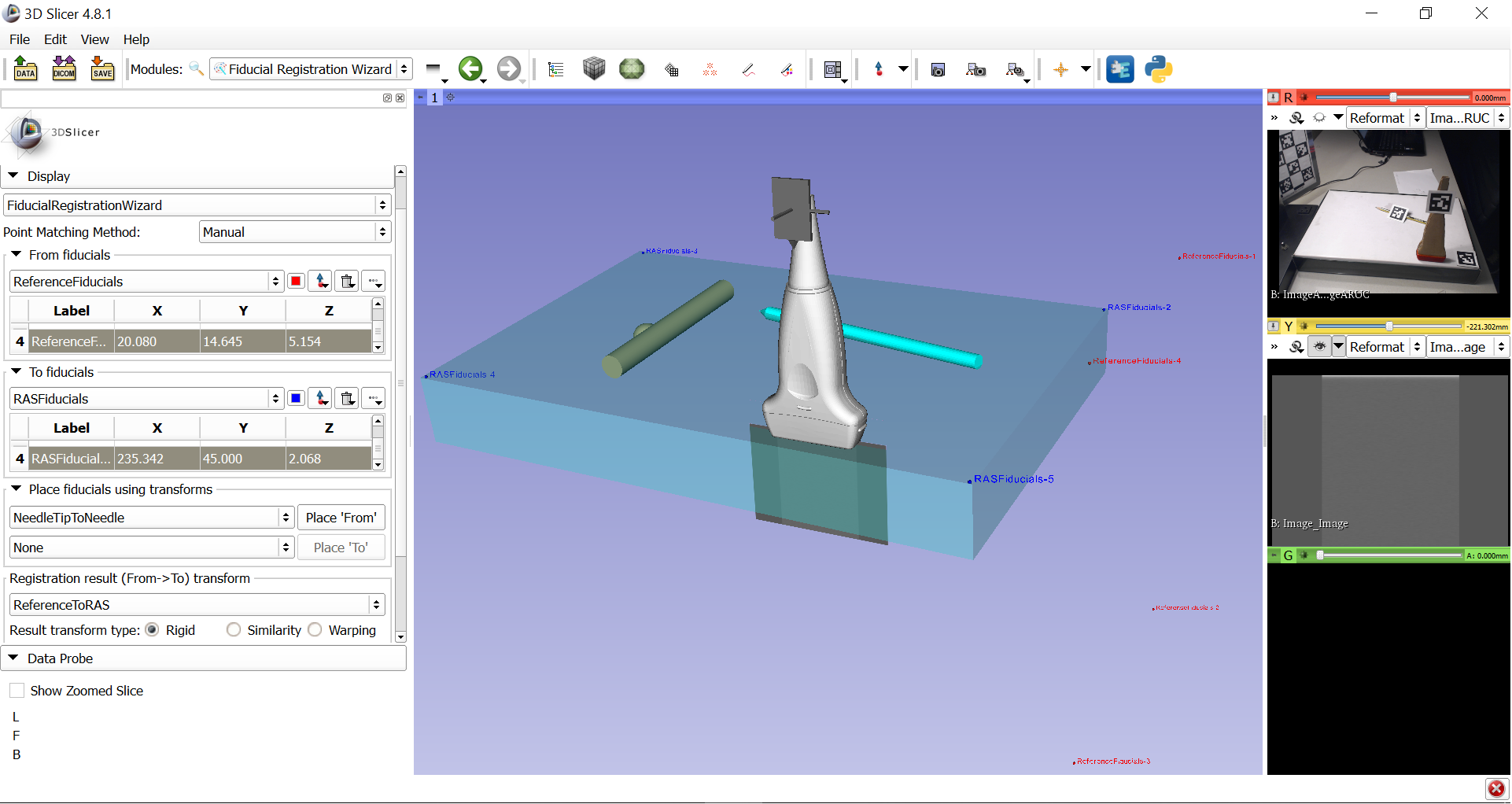
PLUS Ultrasound simulator device running in Slicer